在激光雷達(dá)的量產(chǎn)元年,各大造車新勢(shì)力公司逐步上線自研視覺感知算法,特斯拉宣布徹底拋棄毫米波雷達(dá)之際,毫米波雷達(dá)在自動(dòng)駕駛中應(yīng)何去何從?
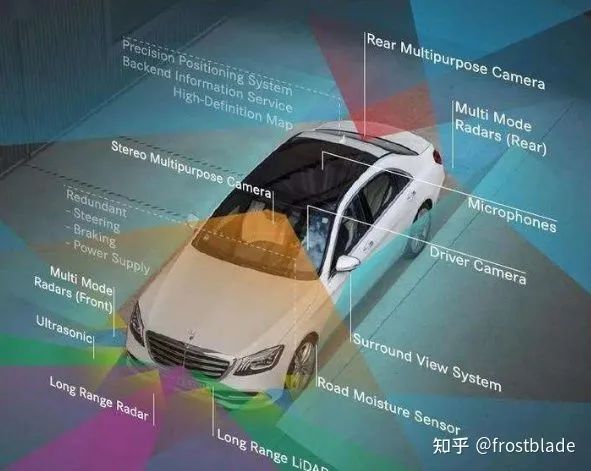
目前自動(dòng)駕駛使用的主要傳感器是攝像頭、毫米波雷達(dá)和激光雷達(dá)。目前多數(shù)主打自動(dòng)駕駛特性的新車上都同時(shí)配備了上述三種傳感器,期望通過融合實(shí)現(xiàn)最優(yōu)的性能。上述三種傳感器各有優(yōu)劣勢(shì),也經(jīng)歷了不同的發(fā)展過程。在融合之外,也不免面臨很多競(jìng)爭(zhēng)。例如特斯拉老板Elon Mask主推純視覺方案,鄙夷激光雷達(dá),到后來連毫米波雷達(dá)也放棄。另外,隨著激光雷達(dá)成本降低,性能符合量產(chǎn)車規(guī)要求,也在逐步蠶食傳統(tǒng)毫米波雷達(dá)在自動(dòng)駕駛中的作用空間。
毫米波雷達(dá)可以說是最早應(yīng)用于量產(chǎn)自動(dòng)駕駛的傳感器,在1999年,奔馳220系列S級(jí)轎車上搭載的Distronic(DTR)雷達(dá)控制系統(tǒng),可以在時(shí)速40~160km的范圍內(nèi)控制本車和前車的距離,實(shí)現(xiàn)了基本的ACC功能。目前各大國(guó)際主流毫米波廠商,例如博世、大陸、安波福,其前裝量產(chǎn)毫米波雷達(dá)已經(jīng)發(fā)展到了第5代,基本保持2~3年一代的更新速度。同時(shí)國(guó)內(nèi)的毫米波雷達(dá)廠商也已經(jīng)有了5年左右的發(fā)展,頭部公司的量產(chǎn)產(chǎn)品已經(jīng)接近國(guó)際先進(jìn)水平。雖然在精度和探測(cè)距離上有了很大的提升。但總體而言,其發(fā)展階段尚未實(shí)現(xiàn)本質(zhì)的突破。
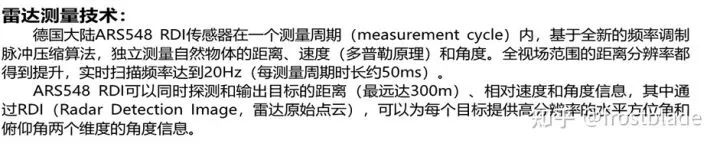
對(duì)毫米波雷達(dá),目前的量產(chǎn)毫米波雷達(dá)都只能稱為3D(距離-方位角-多普勒)雷達(dá)或準(zhǔn)4D雷達(dá),基本上缺失或有很弱的俯仰測(cè)角/測(cè)高能力,這就導(dǎo)致雷達(dá)無法單獨(dú)作為傳感器識(shí)別前方的靜止障礙物,因?yàn)槠錈o法區(qū)分前方的車輛(真實(shí)障礙)和前方的橋梁/井蓋(虛假障礙)。在不頻繁觸發(fā)誤報(bào)的前提上,這會(huì)大大降低了障礙物感知的召回率。為了解決上述問題,目前已經(jīng)有4D雷達(dá)問世,可以實(shí)現(xiàn)較高精度的二維角度測(cè)量,如大陸的ARS548,但其在量產(chǎn)中的應(yīng)用效果尚缺乏驗(yàn)證。同時(shí)目前的4D雷達(dá)成本也較高。預(yù)計(jì)在2年左右的時(shí)間里,其可以達(dá)到量產(chǎn)前裝的要求。
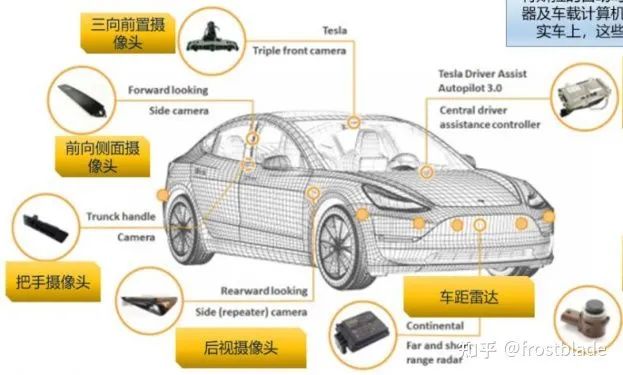
對(duì)視覺,早期的視覺方案以智能攝像頭方案為主,即只有1個(gè)前向的攝像頭,但可以在內(nèi)部實(shí)現(xiàn)感知算法,直接輸出目標(biāo)級(jí)的障礙物信息和車道線信息。因此可以用來做1R1V的融合或5R1V的融合。大大降低了主機(jī)廠的開發(fā)難度。目前的L2級(jí)自動(dòng)駕駛大多還是這個(gè)路線。而像特斯拉的HW1.0–基于Mobileye芯片的第一代駕駛輔助硬件。它使用了單個(gè)EQ3系列攝像頭,單個(gè)毫米波雷達(dá)和12個(gè)中程超聲波傳感器,毫米波雷達(dá)是由博世提供,攝像頭布置于后視鏡附近,硬件選型都是基于市場(chǎng)上成熟的供應(yīng)商產(chǎn)品,在HW1.0階段特斯拉的主要工作也是多傳感器融合+應(yīng)用層軟件開發(fā)。特斯拉在2016年發(fā)布了基于自主研發(fā)視覺算法的自動(dòng)駕駛系統(tǒng),這樣促使很多主機(jī)廠意識(shí)到多個(gè)圖像傳感器+深度學(xué)習(xí)感知計(jì)算平臺(tái)的方案實(shí)現(xiàn)遠(yuǎn)超過單個(gè)智能攝像頭的優(yōu)勢(shì):車身360度的感知覆蓋、核心算法掌握在自己手里、可以通過數(shù)據(jù)驅(qū)動(dòng)不斷升級(jí)迭代同時(shí)OTA。國(guó)內(nèi)最早發(fā)布自研視覺感知方案的是在2020年上市的小鵬P7上的XPilot 3.0系統(tǒng)。目前國(guó)內(nèi)多數(shù)新勢(shì)力造車也會(huì)選用這一自研路線。
對(duì)激光雷達(dá),其機(jī)械掃描的版本很早就應(yīng)用到各種無人車中,但由于量產(chǎn)車對(duì)品質(zhì)和價(jià)格的要求更高,因此直到2021年,國(guó)內(nèi)才開始發(fā)布搭載激光雷達(dá)的量產(chǎn)車,如小鵬P5搭載了兩顆 Livox覽沃科技提供的HAP激光雷達(dá),單個(gè)橫向視角120°,針對(duì)低反射物體探測(cè)距離可達(dá)150米,角分辨率高達(dá)0.16°*0.2°,點(diǎn)云密度等效于144線激光雷達(dá)。其他領(lǐng)頭羊如速騰聚創(chuàng)和禾賽科技都發(fā)布了車規(guī)級(jí)固態(tài)激光雷達(dá)。應(yīng)用于量產(chǎn)車的固態(tài)激光雷達(dá)滿足了車規(guī)級(jí)的質(zhì)量標(biāo)準(zhǔn),將成本從幾萬元下降到了數(shù)千元的量級(jí),但也損失了360度的探測(cè)能力。另外,目前的高性能計(jì)算平臺(tái)也促進(jìn)了激光雷達(dá)的數(shù)據(jù)處理和目標(biāo)檢測(cè)性能提升,已經(jīng)從傳統(tǒng)基于規(guī)則的點(diǎn)云處理策略全面轉(zhuǎn)向基于深度學(xué)習(xí)的點(diǎn)云處理策略。

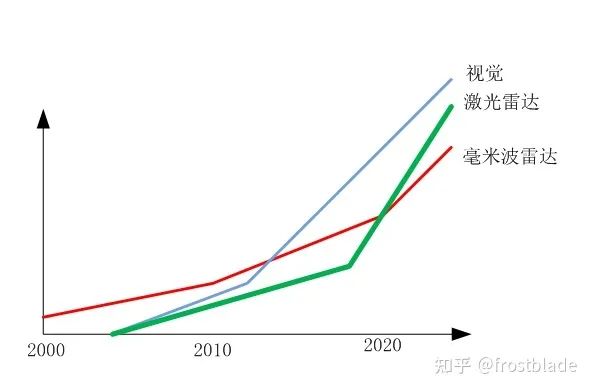
總體而言,毫米波雷達(dá)的發(fā)展最早,但贏來突破的時(shí)間點(diǎn)卻最晚,以國(guó)內(nèi)為例,視覺方案2016年實(shí)現(xiàn)了全向感知的突破,激光方案在2021年會(huì)實(shí)現(xiàn)固態(tài)量產(chǎn)突破,而毫米波雷達(dá)預(yù)計(jì)會(huì)在2023年實(shí)現(xiàn)4D雷達(dá)量產(chǎn)的突破,在2024或2025年上線基于4D雷達(dá)的感知方案。
對(duì)毫米波雷達(dá)而言,其感知召回率很高,但最大的問題是誤檢,包括各類雜波、多徑反射、無法判別高度的目標(biāo)等。引起這些問題的除了硬件自身的原因,軟件上也存在很大問題。毫米波雷達(dá)目前的數(shù)據(jù)處理都是在雷達(dá)內(nèi)部實(shí)現(xiàn),依賴算力較低的MCU+傳統(tǒng)基于規(guī)則和認(rèn)識(shí)的策略進(jìn)行數(shù)據(jù)處理,自然無法實(shí)現(xiàn)目前深度學(xué)習(xí)可以達(dá)到的感知性能。

作為最早量產(chǎn)的自動(dòng)駕駛傳感器,毫米波雷達(dá)卻被攝像頭和激光雷達(dá)甩在了身后,個(gè)人覺得大部分原因可以用“門檻”二字來概括。毫米波雷達(dá)無論是硬件還是算法,其門檻都相對(duì)較高。硬件設(shè)計(jì)依賴極高的射頻基礎(chǔ),加工工藝相對(duì)復(fù)雜,需要多年的技術(shù)經(jīng)驗(yàn)積累。因此目前主要硬件技術(shù)還是掌握在國(guó)外老牌芯片供應(yīng)商和汽車零部件供應(yīng)商手里,國(guó)內(nèi)的毫米波雷達(dá)創(chuàng)業(yè)公司也大多需具有相關(guān)高校、研究所的背景。而算法方面,雷達(dá)數(shù)據(jù)的回波強(qiáng)度信息、多普勒信息較視覺的圖像和激光的3D點(diǎn)云復(fù)雜的多,其回波點(diǎn)的特性解讀和分析也依賴大量經(jīng)驗(yàn)積累和物理知識(shí)。目前國(guó)內(nèi)自動(dòng)駕駛領(lǐng)域的行業(yè)人才多來自計(jì)算機(jī)、自動(dòng)化和機(jī)械相關(guān)專業(yè),多數(shù)沒有諸如信號(hào)與系統(tǒng)和射頻技術(shù)的理論基礎(chǔ)。與其面對(duì)晦澀難懂不容易出效果的毫米波雷達(dá)數(shù)據(jù),不如直接上手直觀容易理解的激光雷達(dá)和視覺感知。工業(yè)界如此,學(xué)術(shù)界也是如此。每年計(jì)算機(jī)、機(jī)器人領(lǐng)域國(guó)際會(huì)議上有關(guān)毫米波雷達(dá)感知的文章寥寥無幾,但與視覺、激光雷達(dá)感知相關(guān)的文章則是層出不窮,很多方案都不需要自己進(jìn)行過多開發(fā),網(wǎng)上開源的SOTA唾手可得。
在當(dāng)下深度學(xué)習(xí)迅猛發(fā)展(天時(shí))+集中式處理的系統(tǒng)方案(地利)+低門檻(人和)的加持下,視覺感知+激光感知迅猛發(fā)展,但毫米波雷達(dá)的感知卻是慢了半拍。
在目前的激烈的競(jìng)爭(zhēng)下,毫米波雷達(dá)相較視覺測(cè)速、測(cè)距準(zhǔn)確的優(yōu)勢(shì)已經(jīng)逐漸不明顯,而且激光雷達(dá)同樣也可以實(shí)現(xiàn)較高精度的測(cè)速和測(cè)距。但在量產(chǎn)激光雷達(dá)上車覆蓋360度依舊成本相對(duì)較高,且僅有特斯拉可以實(shí)現(xiàn)超強(qiáng)的視覺感知方案的現(xiàn)狀下,毫米波雷達(dá)較高的測(cè)距、測(cè)速精度仍是多傳感器融合不可或缺的信息來源。
對(duì)激光和毫米波雷達(dá),在體制上都逐漸趨同化,向著高精度、遠(yuǎn)距離、抗干擾的路線發(fā)展。但有一點(diǎn)是不能改變的,那就是波的頻段。毫米波的頻段決定了其無法完全從回波層面解決一些多徑的影響,但也具有光學(xué)(攝像、激光)傳感器無法比你的優(yōu)點(diǎn):對(duì)惡劣天氣,如沙塵、濃霧、雨天的適應(yīng)性。當(dāng)然這些路況還不是目前自動(dòng)駕駛落地需要考慮的主要問題,但其將作為自動(dòng)駕駛技術(shù)的“長(zhǎng)尾問題”和自動(dòng)駕駛領(lǐng)域的“增量市場(chǎng)”,在未來必定得到更多的關(guān)注。

另外,雖然毫米波雷達(dá)電磁波的多次反射有時(shí)候會(huì)引起虛假目標(biāo),但其同樣也帶來了一個(gè)優(yōu)勢(shì):不容易被完全遮擋。在密集的場(chǎng)景中,通常只有毫米波雷達(dá)能看到本車道前方甚至前前方的車輛、行人。但光信號(hào)則會(huì)完全被遮擋。

車載毫米波雷達(dá)目前的一個(gè)重要發(fā)展方向是4D雷達(dá),其依賴更復(fù)雜的硬件系統(tǒng)實(shí)現(xiàn)更高的性能,但也伴隨著成本的增加。個(gè)人認(rèn)為,毫米波雷達(dá)的另一個(gè)方向是低成本和輕量化,其最終可以逐漸取代超聲波雷達(dá),并利用諸如測(cè)速、測(cè)角能力,實(shí)現(xiàn)更多的人車交互功能,例如DOW、后備箱開啟等。
從整個(gè)自動(dòng)駕駛的角度看,目前的方向是通過堆傳感器和堆算力,提升自動(dòng)駕駛能力,從而逐步實(shí)現(xiàn)更高級(jí)別的自動(dòng)駕駛。但對(duì)于很多低成本的車型,上述能力還是不可接受的,而低成本車型的市場(chǎng)量也是巨大的。在這些車型上,1V1R將作為長(zhǎng)期的有效方案。走農(nóng)村包圍城市的路線,依賴下沉市場(chǎng)取得成功,在拼多多的事例里已經(jīng)得到了很好的驗(yàn)證。
從算法問題看,毫米波雷達(dá)感知處理要解決的問題可以從三個(gè)角度描述:檢測(cè)、狀態(tài)估計(jì)、屬性估計(jì)。在檢測(cè)上,要實(shí)現(xiàn)高的召回率的同時(shí)降低誤檢,比如目前常見的多次反射目標(biāo)和可穿越目標(biāo);在狀態(tài)估計(jì)上,要實(shí)現(xiàn)更高的位置和速度估計(jì)精度;在屬性估計(jì)上,提供更加準(zhǔn)確和豐富的屬性,例如可信度、類別、尺寸等。多維度處理和數(shù)據(jù)驅(qū)動(dòng)是實(shí)現(xiàn)上述目標(biāo)的關(guān)鍵。深度學(xué)習(xí)的方法很可能是毫米波雷達(dá)感知技術(shù)的突破點(diǎn),巫婆塔里的工程師:毫米波雷達(dá):感知算法 黃浴:應(yīng)用于雷達(dá)信號(hào)的深度學(xué)習(xí)方法 這兩篇文章都給出了一些很好的深度學(xué)習(xí)在毫米波雷達(dá)感知處理上的應(yīng)用案例。
從數(shù)據(jù)處理的角度看,其實(shí)毫米波雷達(dá)的回波強(qiáng)度信息也蘊(yùn)含了一定的目標(biāo)語義。包括多普勒速度。可以說,毫米波雷達(dá)最終的數(shù)據(jù)形態(tài)是5D維度的:斜距、方位角、俯仰角、多普勒速度、強(qiáng)度。當(dāng)點(diǎn)云密度和激光雷達(dá)、視覺不能比擬的時(shí)候,充分利用挖掘上述信息,也可以為毫米波雷達(dá)帶來新的亮點(diǎn)。